Does the ever-changing world of sonar spin too fast for you? Are you sometimes bewildered by all the new bells and whistles available on fish finders today?
If you answered “yes” to these questions, you’re most likely part of the can’t-keep-up majority.
But fear not! Take that next bold step forward, and invest in the new technology of fishing. We have so many resources to help us: The major marine-electronics manufacturers provide readily accessible Q&As and how-to videos online, available any time of day or night.
To help jump-start the learning curve, I asked five companies — Furuno, Garmin, Humminbird, Raymarine and Simrad/Lowrance — to share some of the most commonly asked questions from anglers about sonars and fish finders. (The companies’ answers have been edited for space.)
Simrad/Lowrance
Q. What causes bottom loss?
A. The most common cause of bottom loss is aerated water, such as when you travel over the recent wake of a nearby boat or you back down into your own wake. When this occurs, there are so many bubbles in the water deflecting the sound in every direction that we don’t have a strong enough signal to accurately determine the depth. Some other causes can be storm or wind-churned seas, or heavy amounts of debris that could be anything from plankton to seaweed.
In rough seas, you also might encounter a similar condition where you have a good bottom lock when drifting, but while underway, the combination of the hull design and the additional air in the water from the rough seas prevents sufficient bottom returns.
Q. What frequencies should I use for shallow-, mid- and deepwater fishing?
A. As a general rule, you want to use the highest frequency and the lowest power that will give you the information without saturating the return with too much noise. One general rule: The deeper you fish, the lower the frequency. Sound waves travel well in water, but lower frequencies travel farther and provide better returns in deep water.
Broadly speaking, when you fish in depths over 1,500 feet, use frequencies below 140 kHz. If you’re in 600 to 1,500 feet, something between 80 kHz and 150 kHz works well. If you’re looking at shallow depths up to 600 feet, a frequency above 150 kHz provides good performance.
Note that chirp transducers vary the frequency and allow more energy to be introduced into the water column, thus providing anglers with better target location as well as improved target discrimination.

Raymarine
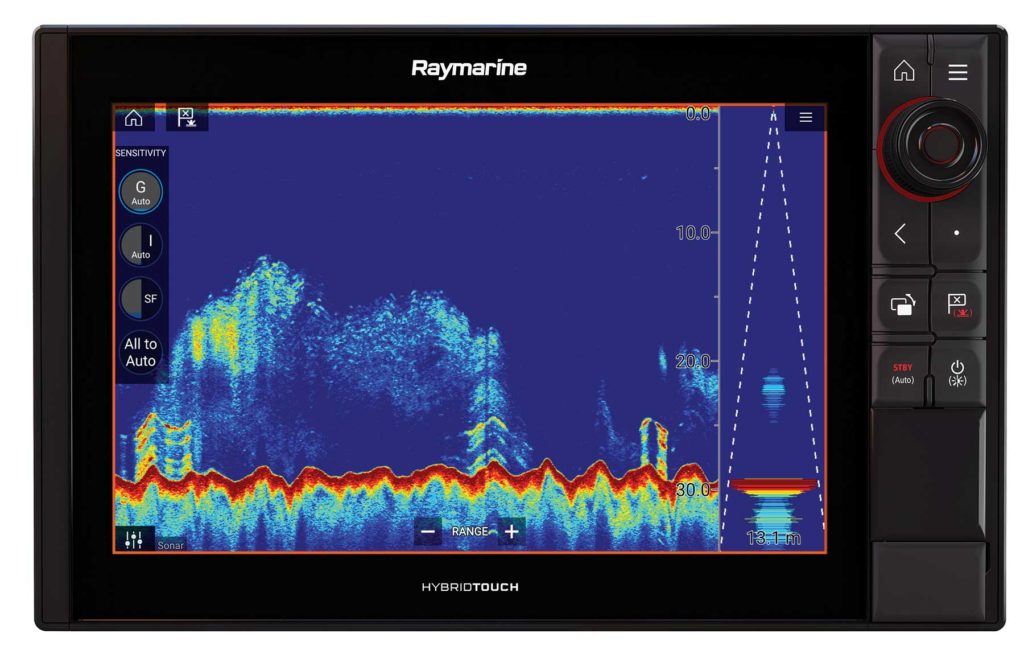
Q. How can I tell the width of the area I am looking at on my sonar screen?
A. Since all the downward-looking sonar beams are cone-shaped, the width of the area of the bottom seen at any given time varies according to the depth of the water and the particular beam used. As the water gets deeper, the beam gets wider, but there isn’t always a direct 1-to-1 relationship.
Most sonar systems include a mode called A-Scope, which tells you the diameter of the sonar’s beam on the bottom. The display updates in real time as the depth increases and decreases. The A-Scope mode also helps you know when fish are actually in the transducer beam. The regular sonar display is processed and slightly time delayed, while the A-Scope mode is live, real-time imaging.
Q. Is it possible to determine what species of fish are down there by looking at the returns on the screen?
A. It is possible to identify fish species by the characteristics of their sonar returns, but it’s a skill that takes practice. Most fish are detected by sonar due to the presence of their internal air bladder. That giant bubble of air acts as a sound reflector. The size and shape of the air bladder varies by species, but the shape of the return on the screen is generally similar for all members of the same species. With practice you’ll be able to see these subtle characteristics.
Many of today’s imaging sonars also do a great job of showing you the actual shape of the fish below. Technologies such as chirp DownVision and chirp SideVision work in a higher frequency band that’s optimized for reporting density and shape, rather than just returns off an air bladder. Consequently, you can sometimes see a fish’s dorsal fins, tail, pectorals and even pelvic fins on the sonar.
Read Next: Choose the Right Sounder for the Way You Fish
Furuno
Q. I’ve been using my fish finder on auto mode but would like to use some of the other settings to enhance readings. For example, locating tuna in depths from 300 to 3,000 feet.
A. While auto modes have greatly improved over the years, you can still adjust the manual settings to sometimes achieve better results, depending on fishing conditions. Start by adjusting the Transmission (TX) rate to 20 and then increase the output power (gain). Adjusting the TVG (Time Variable Gain) can also help to enhance the targets within a certain depth range. One of its best features is the post-gain (all-gain) capability. This lets you adjust the gain on the entire screen, so if you passed over a school of tuna, you see how varying the gain affected the targets.
Clutter control also affects past targets. Try to adjust the sounder’s picture solely with the main gain control, and when you start to see clutter, back off the gain a little. Try this the next time out: Turn up the gain until you start to see clutter on the screen, and then increase it a half-point higher. At this point, you should start seeing a lot of blue speckles. Now, increase the clutter level until these blue speckles disappear.
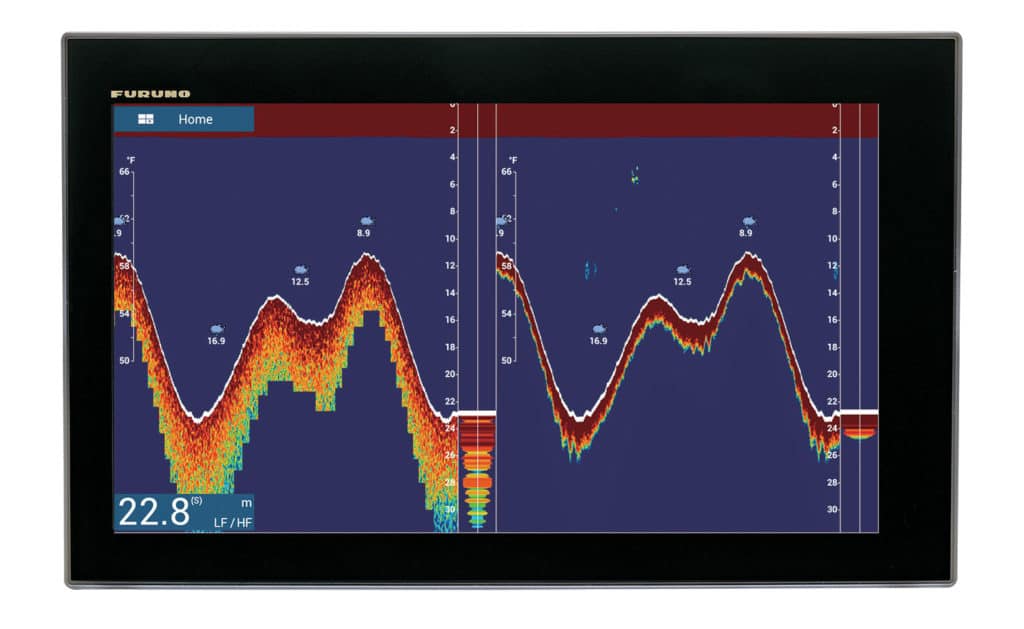
Q. What’s the best way for me to see bottomfish on my screen?
A. I have a tough time separating them from the bottom.
There’s a feature called White Line that can be set within the menus, which helps you distinguish bottomfish from the bottom echo by tracing a white line just above the bottom contour. When an echo from a fish on the bottom is returned, it displays in a different color, sitting just above the white line. In addition to discriminating bottom from fish, the white line feature also helps you judge fish-school density.
Humminbird
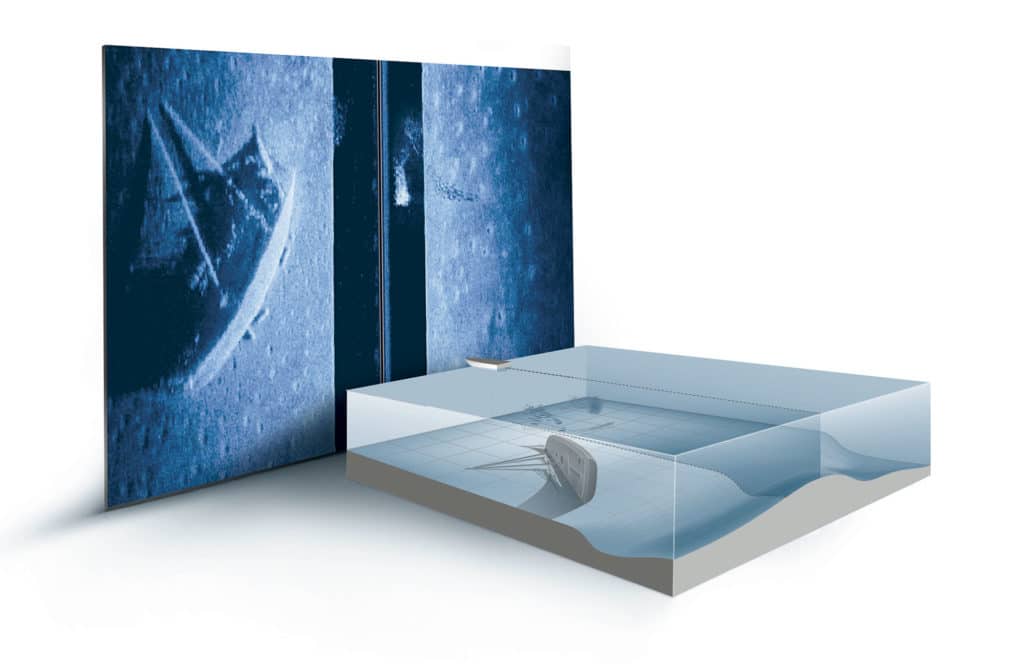
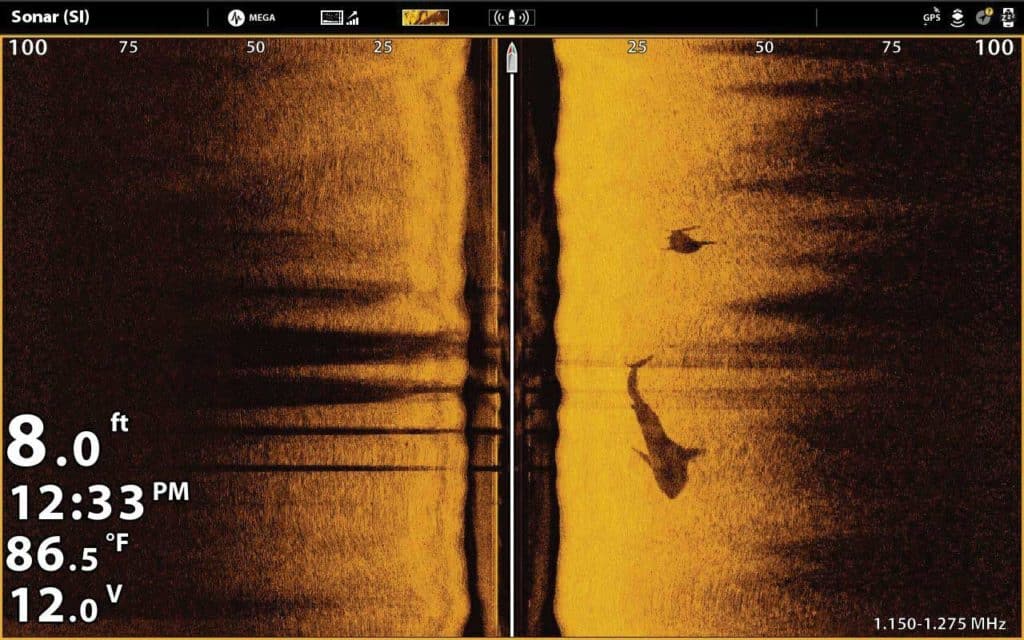
Q. What am I looking at with Side Imaging?
A. Side Imaging is a 180-degree side-to-side perspective on the world below the surface. Humminbird sonar’s ultrathin high-frequency beam scans the area up to 240 feet to the left and right of your boat location, for total coverage of up to 480 feet. The return image for each slice is then added to the images taken immediately before and after to build an incredible view of the ocean bottom. You can then magnify the detail of the image with the zoom feature or mark the GPS location of promising cover or structure directly on the screen.
Garmin
Q. How do I properly maintain my transducer for optimal performance? Can I paint my transducer to prevent growth?
A. Yes, transducers can be painted with a water-based, nonmetallic anti-fouling paint. If your transducer has a paddle wheel for speed, do not paint the paddle wheel.
It’s recommended to use a soft cloth and mild household detergent to clean a transducer. If the fouling is severe, remove the growth with a green Scotch Brite pad. Be careful to avoid scratching the face of the transducer.
It’s possible to wet-sand the paddle wheel on a speed sensor with a fine-grade wet/dry sandpaper. If the growth appears frequently, it’s recommended to apply anti-fouling paint approximately every six months.